Minimal RTOS for Raspberry Pi Pico
For this project I was reading into real-time operating systems (RTOS) and wanted to build out the minimal requirements of an RTOS. The primary purpose of this RTOS is to handle multiple scheduled tasks each with specific interval requirements and run them concurrently or as close to. The RTOS features flexible scheduling to allow you to choose between ROUND_ROBIN or PRIORITY_BASED. The ROUND_ROBIN scheduler ensures that each task gets an equal share of the CPU, whereas the PRIORITY_BASED scheduler will execute higher priority tasks first, but will fall back to a round-robin approach for equal-priority tasks.
Hardware Setup
Refer to the following schematic to connect LEDs, a button, and a potentiometer to your Raspberry Pi Pico:
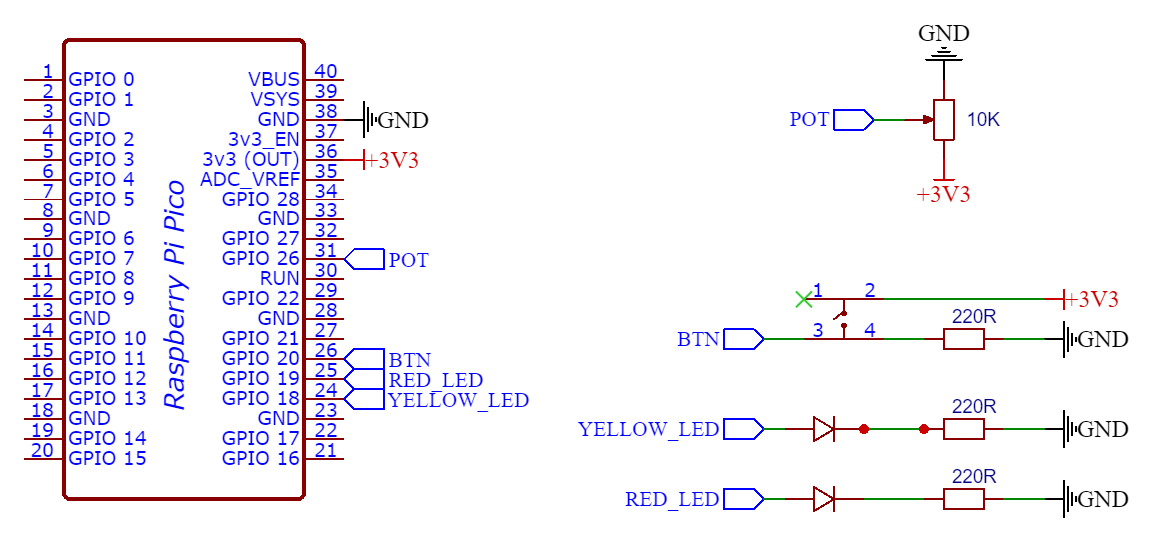
This RTOS implementation uses the following components to demonstrate the functionality
- Raspberry Pi Pico
- 10K potentiometer
- 4pin tactile switch
- 2*LEDs
- 3*220R Resistors
For more complete documentation and to view the source code, view the Repository on GitHub:
View on GitHub